
A groundbreaking development in enhancing exploration within CERN’s intricate facilities has recently unfolded with the successful radiation protection test completion of the cutting-edge robotic solution known as the CERNquadbot within the Laboratory’s expansive North Area. This innovative four-legged robot represents a significant stride in CERN’s ongoing quest for adaptable and agile robotic companions capable of navigating challenging environments.
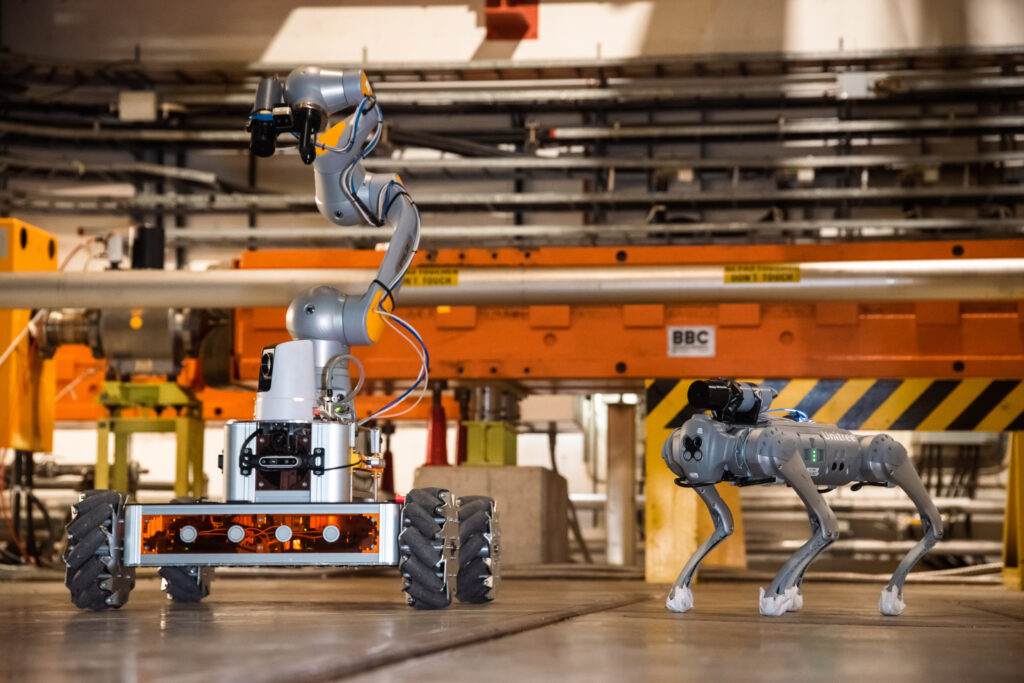
Residing within Building 937, the hub for CERN’s most advanced robot development, the CERNquadbot emerges as a promising addition to the Laboratory’s robotic arsenal. Unlike its predecessors, which mainly featured wheeled or tracked designs, the CERNquadbot stands out with its four legs, offering unmatched stability and manoeuvrability in cluttered and uneven terrains. Chris McGreavy, a robotics engineer at CERN’s Controls, Electronics and Mechatronics (CEM) group, underscores the importance of this advancement, stating, “There are large bundles of loose wires and pipes on the ground that slip and move, making them unpassable for wheeled robots and difficult even for humans.”
The versatility of the CERNquadbot extends beyond its stability, as it is poised to navigate the intricate caverns housing experiments such as the ALICE detector. Equipped with advanced control algorithms, these robodogs are primed to monitor environmental conditions and promptly detect anomalies such as water or fire leaks. McGreavy stresses their critical role, stating, “They can identify water or fire leaks and other incidents, such as false alarms, promptly, all of which can significantly impact the operation of the machines in the caverns and tunnels.”
Each robot at CERN is meticulously crafted to complement its counterparts, thus optimizing exploration capabilities. While the Train Inspection Monorail (TIM) excels in monitoring vast distances within the Large Hadron Collider (LHC) from above, the CERNquadbot ventures into unexplored territories on the ground beneath the beamline. McGreavy elaborates on their symbiotic relationship, noting, “The TIMs are used for monitoring the large distances of the LHC from above and can travel long distances without recharging. They can deploy the quad boots in local areas to get more information about specific places the TIM cannot easily access.”
With its capability to traverse previously inaccessible terrains, the CERNquadbot ushers in a new era of exploration within CERN’s facilities. Unlike its predecessors, constrained by their mode of locomotion, this innovative robotic solution transcends traditional limitations, providing unprecedented access to diverse environments. As the Beams department continues to innovate and engineer novel robotic solutions, the possibilities for exploration within CERN’s complex infrastructure remain boundless.
The successful integration of the CERNquadbot into CERN’s robotic ecosystem signifies a remarkable milestone in the Laboratory’s pursuit of innovation and exploration. With its stability, versatility, and agility, this four-legged marvel promises to revolutionize how robots navigate and interact within CERN’s unique environments. As researchers push the boundaries of robotics, the future holds exciting prospects for further advancements in exploration and discovery within particle physics.







