Researchers at Carnegie Mellon University (CMU) have unveiled a new reinforcement learning framework called H2O – Human2HumanOid – which enables a full-sized humanoid robot to be controlled in real-time by a human using just an RGB camera. This development leads to speculation about the future of manual labour being conducted remotely.
The technology allows a humanoid robot to carry out complex tasks that currently require human intervention. Such tasks have been out of reach for autonomous robots due to their complexity. The key to this advancement is the use of reinforcement learning (RL), a type of machine learning where a robot learns from the consequences of its actions, mimicking the trial-and-error learning process seen in humans.
In contrast to traditional machine learning, RL does not necessitate human-labeled data, relying instead on a system of rewards and punishments to guide the robot’s learning process.
“H2O teleoperation is a framework based on reinforcement learning (RL) that facilitates the real-time whole-body teleoperation of humanoid robots using just an RGB camera,” said Tairan He, a lead researcher from CMU’s LeCAR (Learning and Control for Agile Robotics) Lab. “The process starts by retargeting human motions to humanoid capabilities through a novel ‘sim-to-data’ methodology, ensuring the motions are feasible for the humanoid’s physical constraints. This refined motion dataset then trains an RL-based motion imitator in simulation, which is subsequently transferred to the real robot without further adjustment.”
This method enables the researchers to use an RGB camera to capture human movements, which are then imitated by the robot, H2O, in real time.
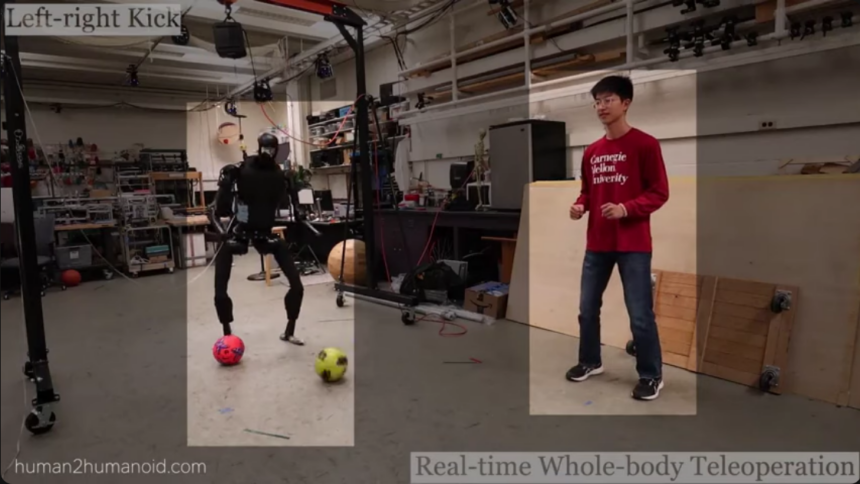
Demonstrations captured on video show the robot performing a variety of tasks such as kicking a ball, disposing of a box, sidestepping in a boxing stance, and pushing a stroller, albeit with the unsteady gait of a toddler. According to the researchers, this is the first instance of real-time whole-body humanoid teleoperation being successfully demonstrated.
The study was detailed in a paper available on the arXiv pre-print server. Additional footage from the LeCAR Lab at CMU showcases the robot engaging in activities like punching an Amazon box with boxing gloves and celebrating with a victory salute, jumping backwards, and withstanding a kick from a human, all designed to display its robustness and versatility.
Future investigations will explore the integration of additional inputs, such as force feedback and verbal interactions, to further enhance the capabilities of H2O. One promising avenue of research involves incorporating lower-body tracking, which could enable the humanoid to replicate more intricate human activities like sports and dance.
The introduction of H2O raises compelling discussions about the potential of remote labour via teleoperated humanoids. Such technology could maintain human employment by assigning dangerous or inaccessible tasks to robots. However, concerns arise about job offshoring and the gradual shift towards fully autonomous robots, which could potentially displace human workers.
A study in 2022 examined public sentiment towards teleoperated robots in labour roles, revealing an openness to remote work even if it offers lower pay. This reflects the ongoing evolution and debate in the field of AI and robotics, where the implications of new technologies continue to unfold.





